
QUALIFICATIONS
- BE Mech (Hons) – 2011
- CPIT – Gas Metal Arc Welding (MIG Welding) Intermediate Course
- CPIT – Gas Tungsten Arc Welding (TIG Welding) Intermediate Course
SOFTWARE
Mechanical CAD Software
- SolidWorks (Dassault)
Architectural / Structure CAD Software
- Navisworks
PDM/PLM Software
- SolidWorks PDM (Dassault)
Analysis Tools
- Excel (for numerical method analysis)
- SolidWorks Simulation (Dassault)

Euan Ward
MECHANICAL ENGINEER
Skills Overview
Euan is an experienced, highly motivated and determined mechanical design engineer. Euan has significant experience in the design of products and machinery as well as the assembly and commissioning of production equipment. Euan is passionate about designing practical solutions to complex engineering challenges and has a strong understanding of manufacturing processes.
- HANDS-ON MECHANICAL DESIGN & MACHINE DEVELOPMENT – Euan has designed numerous products for Springfree Trampoline and Vynco. These all began as conceptual sketches and CAD models to get initial stakeholder buy-in, followed by hand built prototypes which have included turning, milling, welding, tube bending, woodwork, plastering, 3D printing and sewing. In the case of Springfree Trampoline this was followed by developing production machinery and commissioning. His skills in this area, understanding of manufacturing processes, and early involvement of workshop staff have enabled businesses to rapidly develop innovative solutions to engineering challenges.
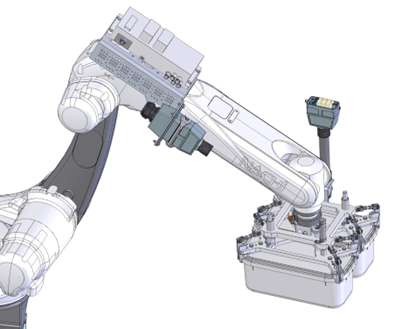
- INDUSTRIAL AUTOMATION – Euan has developed automated industrial equipment utilising six-axis industrial robots with custom end effectors, conveyors, actuators, safety systems and supporting components. Applications have included automated packaging lines, food processing lines, automated press tools, welders and pallet nailing machines. These automated systems have all enhanced throughput and consistency for their end users.
- TESTING & QUALITY IMPROVEMENT – Euan has designed, built and implemented testing equipment to ensure products and equipment are compliant with all relevant standards. This has involved reviewing standards, determining the most efficient testing process, developing test equipment in-house using available tools and machinery, completing testing and developing tools to analyse results, demonstrate compliance and quality improvement suggestions. Euans clear and concise documentation and communication has been essential to achieve these results.
- MODELLING ANALYSIS & FEA EXPERTISE – Euan has developed optimised components for lightweight end effectors meeting tight mass and inertial requirements to ensure robots were operating within their specifications. This required extensive FEA analysis and sound modelling techniques to ensure modifications were able to be made easily between each analysis. Visuialisation was also critical to ensure components did not clash with the robot or surrounding equipment throughout the robots travel path. Euan also uses FEA regularly to verify critical components and investigate options to simplify designs, reducing costs for clients.
- PRACTICAL VERIFICATION – Euan has used his hands-on engineering approach to develop rapid, in-house tests to verify critical aspects of projects prior to further development. These tests have included testing proposed end effector grippers used to lift 200kg wooden flanges via CNC routed geometry, uphill conveyor traction tests and cylinder force requirements to rapidly evacuate viscous contents out of plastic bottles. This fail fast approach minimises downtime and surprises further along the development process and ensures confidence in the selected design and components prior to implementation.
- MACRO DEVELOPMENT – Euan has used his proficiency in VBA to develop macros suited to clients SolidWorks and Excel templates and workflows. This enables clients engineering teams to reduce the amount of time lost performing mundane tasks so they are able to use their time more effectively.
PERSONAL STATEMENT
My old man is a mechanic, and Mum is an electrical engineer, so I grew up around cars, motorbikes, boats, lawn-mowers, and all sorts of workshop equipment in bits and in depth discussions about how things work.
This naturally led me towards building things in the workshop, engineering, and ultimately designing products, production equipment and machinery. I’ve always maintained an interest in hands-on engineering, getting on the tools as much as possible. In my own time I rebuilt my cars engine, motorbikes gearbox, and perform general maintenance on the family’s vehicles and pushbikes. I believe this experience assists me in developing practical, and easily maintained solutions to design problems.
I’m also an avid cyclist, competing in XC mountain bike, gravel, road and cyclo-cross races throughout the year, commuting in adverse conditions and chasing marginal gains through equipment selection. I also enjoy biking through bottle lake forest with my kids, attempting to convince them that biking is superior to driving and dancing.
Project Experience
AUTOMATION
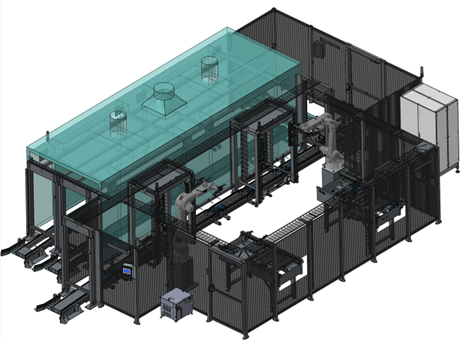
Robotic Tray Loading System
Incline conveyor testing and design, transfer conveyor design, and development of the entire safety system for an automated pudding cooling and lid application system. This included components to ensure operators cannot follow trolleys through the safety light curtains into the system while it is operating.
Orthotic Tape Application Prototyping
The client produces foam wedges that are attached under the heels of their orthotics using double-sided tape. To validate the feasibility of automating this process before investing in a full robotic laser system, we built a demonstration unit. I built and commissioned the demonstration system, making modifications as required, and programmed the robot to place the foam blank onto the exposed double-sided tape. The robot then closed the application roller, pulled the foam blank through, and I refined the speed and clamping pressure until the system produced a bubble-free product. The system also included automated cutting of the double-sided tape. Following successful demonstration, the customer approved the purchase of a complete robotic cell.
Ice Cream Packing Line
The ice cream packing line erected flat-packed cartons of various sizes and packed them with ice cream tubs at speeds of up to 0.5 seconds per tub. To achieve this, we conveyed ice cream tubs of varying geometry and size, collated them into the required format for each carton type, picked up to six tubs at a time, placed them into cartons, and glued the cartons ready for palletising. The system comprised two separate packing lines. Throughout this project, I designed both vacuum and mechanical end effectors to handle all ice cream product variants from the collator, placing them into cartons within robot inertia limits, tight spatial constraints, and strict timing requirements. I also developed the automated carton erection equipment and conveyors, which folded and glued the bottom of each carton.

VYNCO
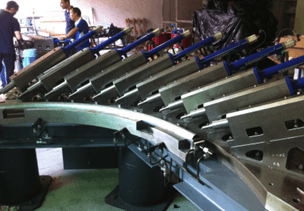
Illusion Grille
Worked with the Vynco engineering team to develop a new architectural grille which leaves only the negative space visible once installed. The design has been patented and deviates from all others on the market as it is installed prior to the plasterboard and incorporates a moulded plaster outer facia. This eliminates the need for the installer to return to site and results in a far stiffer structure with superior plaster adhesion to eliminate plaster cracking between the grille and plasterboard.

Boilers, Pressure Equipment & Pipework
Designed boilers, pressure equipment and pipework with the Lyttelton Engineering Team. The larger projects included designing a 6MW water tube boiler to be run on gas with provisions for biomass fuel conversion, a 5MW fire tube boiler, economisers, pressure pipework, platforms and stairways.
PRODUCTION TOOLING
Hydraulic Press
Designed automated hydraulic presses to pierce and and insert rod sockets in trampoline frames prior to welding. These presses clamped pre-bent frames to a fixed radius and sequentially pierced the frame holes. The operator then loads the rod sockets and the press sequentially inserts them.

SPRINGFREE TRAMPOLINE
Generation 4 Trampoline
Design, assembly and commissioning of tooling, jigs and fixtures for Springfree Trampoline’s factory and assisted with the development of new trampoline prototypes and testing to ensure they are compliant will all relevant standards. Springfree Trampoline produce the only trampolines in the New Zealand and Australian markets that are standard-compliant.
Cleat FEA Analysis
Springfree Trampolines cleat is a plastic ball and socket joint. FEA was performed upon the existing cleat, and revised cleat models under the same loads and constraints allowing comparison to be made prior to investing in tooling. The loads and constraints were applied to mimic the test fixture used by Springfree Trampoline’s plastic supplier during destructive testing.
FlexrStep Development
A new Springfree step was developed to reduce packaging size, labour and material cost. The new step has an additional rung to enable children to climb onto the trampoline more easily.
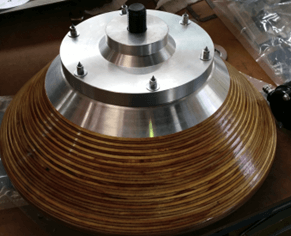
Load vs Deflection Testing
To ensure Springfree trampolines met standards compliance, load versus deflection testing of the mat was required. I designed and built the test equipment and developed the testing procedure to achieve this. The mat was deformed using a conical form as specified in the trampoline standard. I machined the highly loaded components from aluminium on the lathe and mill, and fabricated the bulk of the form from bonded plywood sheets, which were then turned on the lathe. The form was pulled down using a four-wheel-drive winch attached to a welded anchor plate dynabolted to the workshop floor. Load was measured using a strain gauge, and deflection was measured with a laser device and a 45-degree mirror, allowing readings to be taken safely from a distance.

SWINGBALL
Mechanical Score Counter
Worked within a small engineering team to develop a mechanical score counter which virtually eliminates entanglement during play. The score counters index one position per revolution of the ball and are counter rotating, all parts were designed for injection moulding.